
- HomeLonyu
-



 Share to:
Share to:







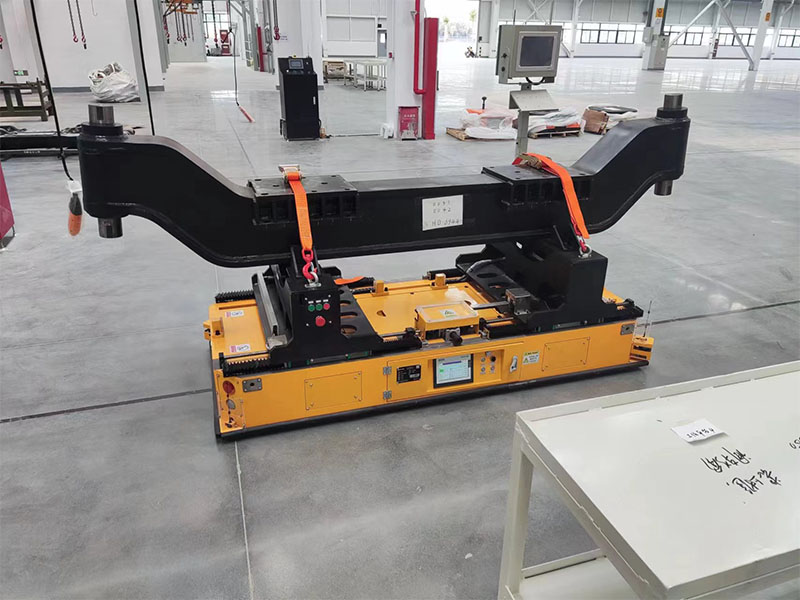
SLAM Navigation- Dual-vehicle Linkage Heavy-duty AGV
Quantity: LONYU
SLAM navigation- dual-vehicle linkage heavy-duty AGV.
Heavy-load AGV
Designing vehicle
Appearance
Pragmatic focus on professional development
Application of Latent
simulate operation
Technical parameters
simulation
Load capacity
15T; 30T(double)
Kerb weight
10T
Dimensions
L3000*W1600*H1000mm (length, width and height)
Lifting stroke
100mm
Driving Mode
Super differential drive
Number of driving wheel
4WD (eight wheels)/per
Accuracy of lifting point
±10mm
Navigation accuracy
±20mm
Linkage positioning accuracy
±20mm
operating speed
3-30m/min(Continuously variable speed)
Linkage operating speed
3-10m/min(Continuously variable speed)
Driving source
DC48V
Mode of traction
Backpack
Communication mode
2.4GWif,433MHZ RF
Alarm mode
sound-light alarm
LFP
AGV dedicated power lithium battery;
Battery life
Continuous work 6H (low-voltage and no-load)
Continuous working 4H (low-speed load)
Electrostatic releasing device
Electrostatic discharge ball
Charging mode
Side orientation online automatic/external charger offline charging
Communication
System WIFI communication, control docking
ground clearance
50mm
Gradeability
<2°
Description: automatic docking AGV and station equipment to realize the automatic online and offline of the tooling.
LONYU
SLAM navigation- dual-vehicle linkage heavy-duty AGV.
Heavy-load AGV
Designing vehicle
Appearance
Pragmatic focus on professional development
Application of Latent
simulate operation
Technical parameters
simulation
Load capacity
15T; 30T(double)
Kerb weight
10T
Dimensions
L3000*W1600*H1000mm (length, width and height)
Lifting stroke
100mm
Driving Mode
Super differential drive
Number of driving wheel
4WD (eight wheels)/per
Accuracy of lifting point
±10mm
Navigation accuracy
±20mm
Linkage positioning accuracy
±20mm
operating speed
3-30m/min(Continuously variable speed)
Linkage operating speed
3-10m/min(Continuously variable speed)
Driving source
DC48V
Mode of traction
Backpack
Communication mode
2.4GWif,433MHZ RF
Alarm mode
sound-light alarm
LFP
AGV dedicated power lithium battery;
Battery life
Continuous work 6H (low-voltage and no-load)
Continuous working 4H (low-speed load)
Electrostatic releasing device
Electrostatic discharge ball
Charging mode
Side orientation online automatic/external charger offline charging
Communication
System WIFI communication, control docking
ground clearance
50mm
Gradeability
<2°
Description: automatic docking AGV and station equipment to realize the automatic online and offline of the tooling.



















